

1 КРОСС-ЗОНАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ ГРУЗОВ
Различают два типа роботизированных систем для перемещения грузов:
- вилочные автономные роботы, являющиеся функциональными аналогами вилочных погрузчиков и палетоперевозчиков;
- универсальные транспортные роботы, перемещающие грузы на специальной оснастке, адаптированной под груз.
1.2 Вилочные роботы-палетоперевозчики (FMR)
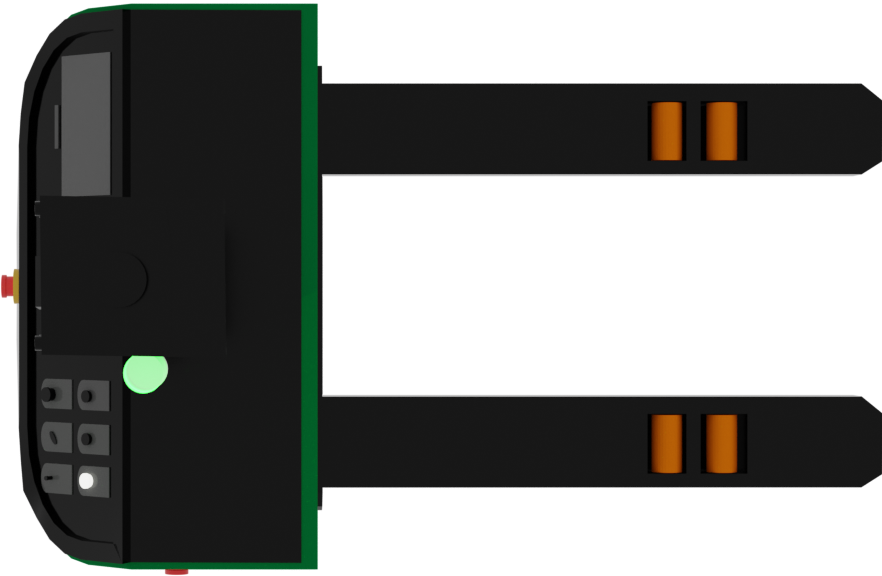
1.2.1 Робот-палетоперевозчик WMF-500

Метод навигации
SLAM, LiDAR
Максимальная скорость
≤ 0,9 м/с
Максимальная грузоподъемность
500 кг
Точность позиционирования*
± 5 мм, ± 1 0
Максимальная площадь карты площадки
≤ 200 000 м 2
Минимальный радиус разворота
1 035 мм
Обмен данными с системой управления
Wi-Fi 802.11a/b/g/n
1.2.2 Робот-палетоперевозчик WMF-CBD15



Метод навигации
SLAM, LiDAR
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
2 м/с
Максимальная грузоподъемность
1500 кг
Точность позиционирования*
± 10 мм, ± 1 0
Максимальная площадь карты площадки
≤ 400 000 м2
Минимальный радиус разворота
1 453 мм
Обмен данными с системой управления
4G/5G/Wi-Fi 802.11a/b/g/n
1.2.3 Робот-штабелер WMF-1000L


Метод навигации
SLAM, LiDAR
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
1,5 /1,7 м/с
Максимальная скорость движения в автоматическом режиме (с полной нагрузкой/без нагрузки)
0,8 /1,2 м/с
Максимальная грузоподъемность
1400 кг
Максимальная высота подъема вил
1 600 мм
Точность позиционирования*
± 10 мм, ± 0,5 0
Максимальная площадь карты площадки
≤ 400 000 м 2
Обмен данными с системой управления
Wi-Fi 802.11 a/b/g/n/ac
1.2.4 Робот-штабелер WMF-CDD16



Метод навигации
SLAM, LiDAR
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
2 м/с
Максимальная грузоподъемность
1 600 кг
Максимальная высота подъема вил
3 000 мм
Точность позиционирования*
± 10 мм, ± 0,5 0
Максимальная площадь карты площадки
≤ 400 000 м2
Минимальный радиус разворота
1 540 мм
Обмен данными с системой управления
4G/5G/Wi-Fi 802.11a/b/g/n
1.2.5 Робот-штабелер WMF-2000CB

Метод навигации
SLAM, LiDAR
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
1,7 м/с
Максимальная скорость движения в автоматическом режиме (с полной нагрузкой/без нагрузки)
0,8/1,2 м/с
Максимальная грузоподъемность
2 000 кг
Максимальная высота подъема вил
3 500 мм
Точность позиционирования*
± 5 мм, ± 0,50
Максимальная площадь карты площадки
≤ 200 000 м 2
Минимальный радиус разворота
1 850 мм
Обмен данными с системой управления
Wi-Fi 802.11a/b/g/n
1.2.6 Робот-штабелер WMF-1500CB


Метод навигации
SLAM, LiDAR
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
1,4 м/с
Максимальная грузоподъемность
1 500 кг
Максимальная высота подъема вил
3 300 мм
Точность позиционирования*
± 5 мм, ± 0,50
Максимальная площадь карты площадки
≤ 400 000 м 2
Минимальный радиус разворота
1 710 мм
Обмен данными с системой управления
Wi-Fi 802.11 a/b/g/n/ac
1.2.7 Робот-штабелер, адаптированный под задачи Заказчика
Возможна поставка роботов-штабелеров, с большей высотой подъема груза, чем у стандартных моделей. Но, нужно учитывать, что, как правило, остаточная грузоподъемность на большей высоте подъема будет ниже, чем максимальная грузоподъемность.
Также возможна поставка узкопроходных роботов-штабелеров.
1.3 Универсальные транспортные роботы
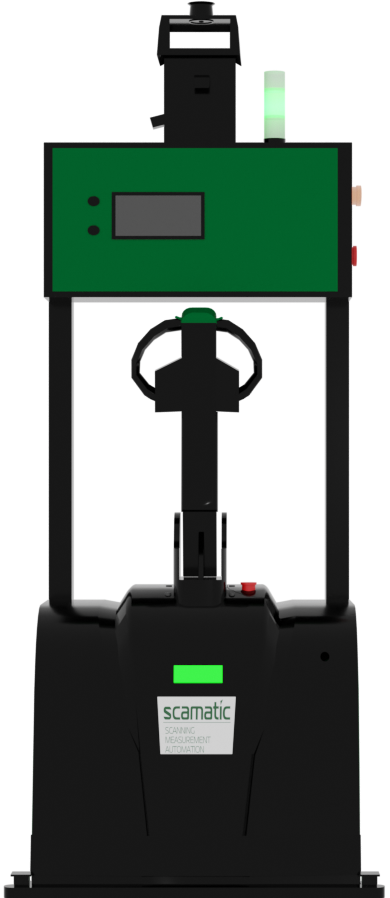
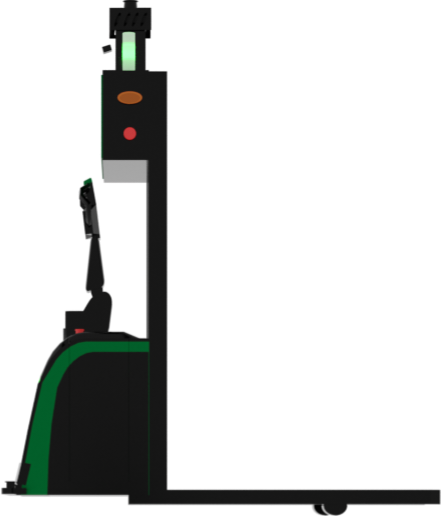
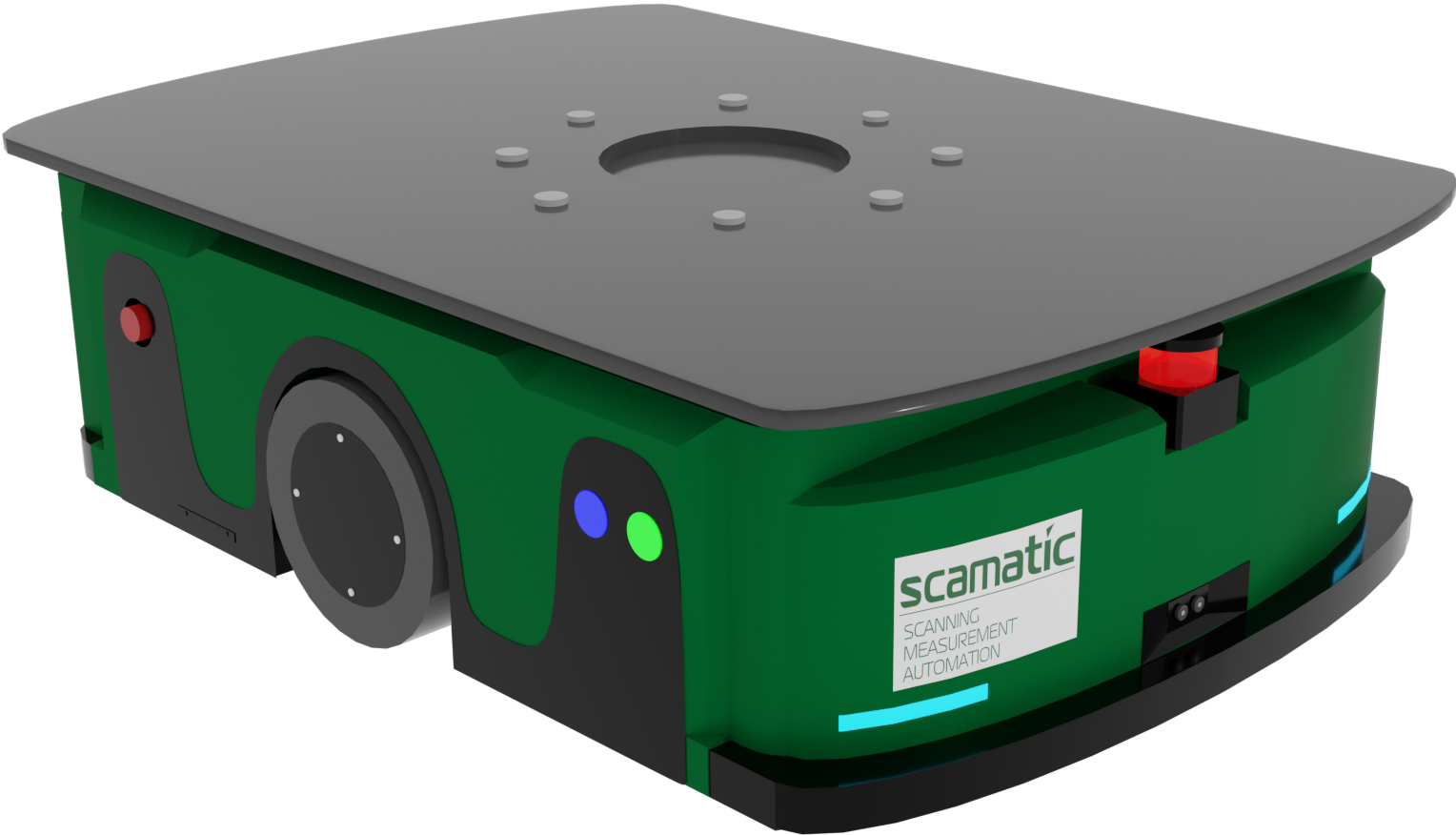
1.3.1 Универсальный туннельный робот WD500SL

Метод навигации
SLAM, LiDARQR-code - опционально
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
0,8/1,2 м/с
Тип привода
Дифференциальный, 2 колеса
Максимальная грузоподъемность
500 кг
Точность позиционирования*
± 10 мм, ± 1,00
Габаритные размеры (ДШВ)
1000х580х300 мм (без бампера безопасности)
Способ стыковки с оснасткой для груза
выдвижные штоки
Обмен данными с системой управления
Wi-Fi 802.11a/b/g/n/ac
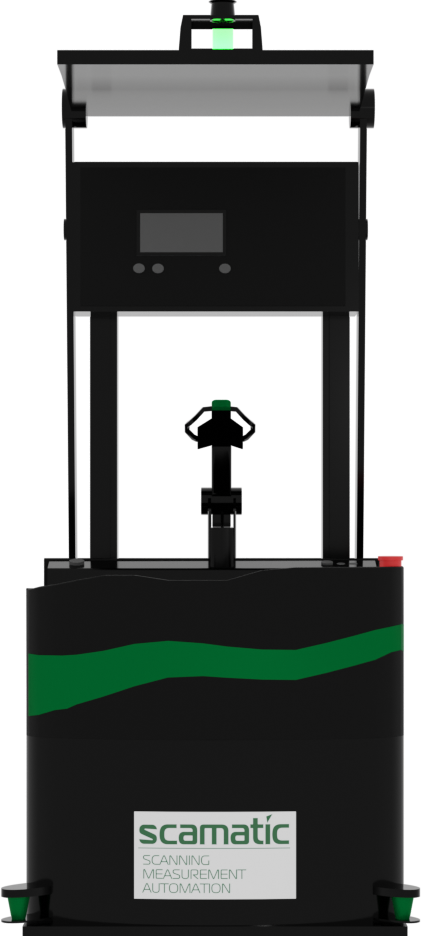
1.3.2 Универсальный транспортный робот с подъемно-поворотной платформой W3-600B
Метод навигации
SLAM, LiDARQR-code - опционально
Максимальная скорость движения (с полной нагрузкой/без нагрузки)
2,0 м/с
Тип привода
Дифференциальный, 2 ведущих колеса
Максимальная грузоподъемность
600 кг
Точность позиционирования*
± 5 мм, ± 1,00
Габаритные размеры (ДШВ)
954х650х250 мм (без бампера безопасности)
Способ стыковки с оснасткой для груза
Подъемно-поворотная платформа
Обмен данными с системой управления
Wi-Fi 802.11a/b/g/n/ac
1.3.3 Транспортный робот, адаптированный под задачи Заказчика
Помимо выдвижных штоков и подъемно-поворотных платформ, транспортные роботы могут оснащаться рольгангами или другими тапами грузовых платформ для работы с грузами. Грузоподъемность транспортных роботов может варьироваться от 300 кг до 5 000 кг и более.